Count unique words
Below is some R code that could be employed to summarize the unique words from the text.
1 | words <- read.table(file.choose(), header = FALSE,fill = TRUE) # import txt file |
Below is some R code that could be employed to summarize the unique words from the text.
1 | words <- read.table(file.choose(), header = FALSE,fill = TRUE) # import txt file |
Command to the ~./bash_logout so that the history will get cleared when you logout
1 | echo `history -c` >> ~/.bash_logout |
Get the name of the history file
1 | echo "$HISTFILE" |
See the current history
1 | history |
Hide and display the cursor in the shell
1 | # Hide the cursor |
Three ways of multiple line annotation
1 | :<<EOF |
Make file executable
1 | chmod +x <file.name> |
Use math equation in shell script (example)
1 |
|
Enable interpretation of the backslash escapes
1 | echo -e |
Read varable and assign to a variable <variable.name>
1 | read <variable.name> |
vi/vim language and affiliated shortcuts
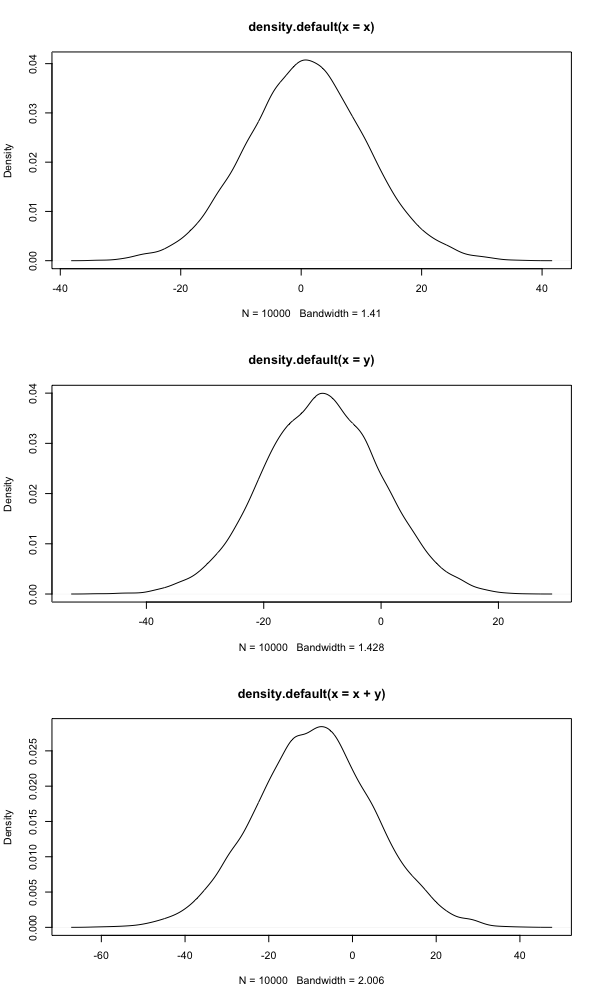
Suppose \(X,Y\) are independent random variables from normal distributions, then sum of these two random variables is also a normal random variable. The proof of this statement could be referred to
Wikipedia-Proof using convolutions
We could also generate graphs to elucidate this process
1 | > x <- rnorm(10000,1,10) |
Since \(lnx\) is the concave function, by Jensen's inequality, we know that \[ ln[E(X)]>E[lnX] \] Another proof can be displayed as follows:
From Simplest or nicest proof that \(1+x \le e^x\), we can prove that
\[ e^x\geq 1+x \]
Expectation of \(e^x\) is \[ \begin{gather*} E(e^Y)=e^{E(Y)}E(e^{Y-E(Y)})\\ \geq e^{EY}E(1+Y-EY)\\ =e^{EY} \end{gather*} \] Therefore, we have \[ e^{EY}\leq E[e^Y] \] Denote \(Y=lnX\), we have \[ e^{ElnX}\leq E(e^{lnX})=EX\\ \Rightarrow E(lnX)\geq ln(EX) \] The equality holds if and only if \(X\) is almost surely constant.
In this part we aim to discover the relationship between \(E[\frac{X}{Y}]\) and \(\frac{EX}{EY}\) under the assumption that
\(X,Y\) are independent
Since \(X,Y\) are independent, then \[ \begin{gather*} P(X\leq x, \frac{1}{Y}\leq y)\\ =P(X\leq x, Y\geq \frac{1}{y})\\ =P(X\leq x)P(Y\geq \frac{1}{y})\\ =P(X\leq x)P(\frac{1}{Y}\leq y)\\ \end{gather*} \] We know that event \(A,B\) are independent if and only if \(P(A,B)=P(A)P(B)\);
Thus \(X,\frac{1}{Y}\) are independent. This implies that \[ E[\frac{X}{Y}]=E(X)E(\frac{1}{Y}) \] Assume \(E[X],E[\frac{1}{Y}]\) are finite.
The function \(\frac{1}{y}\) is strictly convex over the domain \(y>0\). So if \(Y>0\) with prob \(1\), then by Jensen's inequality we have: \[ E[\frac{1}{Y}]\geq\frac{1}{E[Y]} \] with equality if and only if \(Var(Y)=0\) which is when \(Y\) is a constant.
Thus if \(X,Y\) are indepenent and if \(Y>0\) with prob \(1\) then
Uncorrelation means there is no linear dependence between the two random variables, while independence means no types of dependence exist between the two random variables.
Uncorrelated random variables may not be independent, but independent random variables must be uncorrelated.
For example, \(Z\sim N(0,1),X=Z,Y=Z^2\) \[ \begin{gather*} Cov(X,Y)=E[XY]-E[X]E[Y]\\ =E[Z^3]-E[Z]E[Z^2]\\ =E[Z^3]-0\\ =E[Z^3] \end{gather*} \] The moment generating function of distribution of \(Z\) is \[ \begin{gather*} M_Z(t)=E[e^{tz}]\\ =\int e^{tx}\frac{1}{\sqrt{2\pi}}e^{-\frac{z^2}{2}}dz\\ =\int \frac{1}{\sqrt{2\pi}}e^{-\frac{1}{2}(z^2-2tz)}dz\\ =\int \frac{1}{\sqrt{2\pi}}e^{-\frac{1}{2}(z^2-2tz+t^2)+\frac{1}{2}t^2}dz\\ =\int \frac{1}{\sqrt{2\pi}}e^{-\frac{1}{2}(z-t)^2+\frac{1}{2}t^2}dz\\ =e^{\frac{1}{2}t^2}\int\frac{1}{\sqrt{2\pi}}e^{-\frac{1}{2}(z-t)^2}dz\\ =e^{\frac{1}{2}t^2} \end{gather*} \] Using the mgf we obtain the \(E[Z^3]\) as \[ \begin{gather*} E[Z^3]=M_Z'''(t=0)\\ =(0)e^{\frac{1}{2}(0)^2}+2(0)e^{\frac{1}{2}(0)^2}+(0)^3e^{\frac{1}{2}(0)^2}=0 \end{gather*} \] Therefore \[ Cov(X,Y)=E[Z^3]=0 \] This implies \(X,Y\) are uncorrelated, but they are dependent
The expression of variance \[ Var(X)=E[(X-EX)^2]=EX^2-(EX)^2\geq 0 \] Implies that \[ EX^2\geq (EX)^2 \] Here \(X^2\) is an example of the convex function. The definition of convex function is
A twice-differentiable function \(g:I\rightarrow \mathbb{R}\) is convex if and only if \(g''(x)\geq 0\) for all \(x\in I\)
Below is a typical example of the convex function. The function is convex if the line segment between two points from the curve lies above the curve. On the other hand, if the line segment aloways lies below the curve, then the function is said to be concave.

The Jensen's inequality states that for any convex function \(g\), we have \(E[g(X)]\geq g(E(X))\). To be specific.
If \(g(x)\) is a convex function on \(R_X\), and \(E[g(X)]\) and \(g[E(X)]\) are finite, then \[ E[g(X)]\geq g[E(X)] \]
The Taylor series of a real or complex-valued function f (x) that is infinitely differentiable at a real or complex number \(a\) is the power series \[ f(x)\approx f(a)+\frac{f'(a)}{1}(x-a)+\frac{f''(a)}{2!}(x-a)^2+\frac{f'''(a)}{3!}(x-a)^3+\cdots \] Where \(n!\) denotes the factorial of \(n\). In the more compact sigma notation, this can be written as \[ \underset{n=0}{\overset{\infty}{\sum}}\frac{f^{(n)}(a)}{n!}(x-a)^n \] The property of taylor series determines two things:
We provide the following example to illustrate above two properties \[ \begin{gather*} f(x)=lnx(x\in(0,1))\\ f(x)\approx lnx_0+(x-x_0)\frac{1}{x_0}(\text{first order})\\ f(x)\approx lnx_0+(x-x_0)\frac{1}{x_0}-\frac{1}{2}(x-x_0)^2\frac{1}{x_0^2}(\text{second order}) \end{gather*} \]
1 | c1 <- curve(log(x)) |

Below is a good tip for explaining the delta method, from (Alan. H. Feiveson, NASA)
The delta method, in its essence, expands a function of a random variable about its mean, usually with a one-step Taylor approximation, and then takes the variance. For example, if we want to approximate the variance of \(f(X)\) where \(X\) is a random variable with mean \(\mu\) and \(f()\) is differentiable, we can try \[ f(x)=f(\mu)+(x-\mu)f'(\mu) \] so that \[ \begin{gather*} var[f(X)]=var(f(\mu)+(X-\mu)f'(\mu))\\ =var(X-\mu)[f'(\mu)]^2\\ =var(X)[f'(\mu)]^2 \end{gather*} \] This is a good approximation only if \(X\) has a high probability of being close enough to its mean(\(\mu\)) so that the Taylor approximation is still good.
Below is an interesting question about likelihood from a thread in quora
Why do we always put log() in Maximum likelihood estimation before estimate the parameter?
The answer to this question is
\(log(x)\) is an increasing function. Therefore solving the following two problems gives the same result: \[ \begin{gather*} \underset{\theta}{max}\ f(x;\theta)\\ \underset{\theta}{max}\ log(f(x;\theta)) \end{gather*} \]
From above two equations, it seems there is no necessity to put log to solve the problem. The reason to put log is because most of the times it's faster to deal with sums than the products in the objective since it is more convenient to differentiate the sums than produces. For example, suppose we have \(n\) data points \(x_1,x_2,\cdots,x_n\) which are iid drawn from \(f(x;\theta)\) with unknown \(\theta\). MLE of \(\theta\) will solve the following problems:
\[ \begin{gather*} \underset{\theta}{max}\ \underset{i=1}{\overset{n}{\prod}}f(x_i;\theta)\\ \underset{\theta}{max}\ \underset{i=1}{\overset{n}{\sum}}log(f(x_i;\theta)) \end{gather*} \]
Two equations are equivalent, but it may take few additional steps to reach the same condition if we use the product
The Laplace technique can be used to approximate the reasonably well behaved functions that have most of their mass concentrated in a small area of their domain.(Laplace approximation) Technically, it works for functions that are in the class of \(\mathcal{L}^2\), which is also called the square integrable function, meaning \[ \int g(x)^2dx <\infty \] Such a function generally has a very rapid decreasing tails so that in the far reaches of the domain we would not expect to see large spikes.
The Laplace approximation framework is a simple but widely used framework, and aims to find a Gaussian approximation to a probability density defined over a set of continuous variables. (Laplace approximation)
In Bayesian statistics, Laplace approximation can refer to either approximating the posterior normalizing constant with Laplace's method or approximating the posterior distribution with a Gaussian centered at the maximum a posteriori estimate.(Amaral Turkman 2019)
Suppose we want to approximate the pdf \(p(\theta)\), which doesn't belong to any known distribution. The density curve is smooth and well peaked around its point of maxima \(\hat{\theta}\). Thereby, \(\frac{dp(\theta)}{d\theta}|_{\hat{\theta}}=0\) and \(\frac{d^2p(\theta)}{d\theta^2}|_{\hat{\theta}}<0\); thus we can conclude that \(\frac{dlnp(\theta)}{d\theta}|_{\hat{\theta}}=0\) and \(\frac{d^2lnp(\theta)}{d\theta^2}|_{\hat{\theta}}<0\)
Then we can approximate it by a normal pdf. Denote \(h(\theta)=lnp(\theta)\) \[ \begin{gather*} h(\theta)\approx lnp(\hat{\theta})+(\theta-\hat{\theta})\frac{dlnp(\theta)}{d\theta}|_{\hat{\theta}}+\frac{1}{2}(\theta-\hat{\theta})^2\frac{d^2lnp(\theta)}{d\theta^2}|_{\hat{\theta}}\\ =lnp(\hat{\theta})-\frac{1}{2}(\theta-\hat{\theta})^2\frac{-d^2lnp(\theta)}{d\theta^2}|_{\hat{\theta}}\ (\frac{dlnp(\theta)}{d\theta}|_{\hat{\theta}}=0)\\ =lnp(\hat{\theta})-\frac{(\theta-\hat{\theta})^2}{2\sigma^2}\ (\sigma^2=(\frac{-d^2lnp(\theta)}{d\theta^2}|_{\hat{\theta}})^{-1}>0)\\ \Rightarrow p(\theta)=e^{h(\theta)}\approx p(\hat{\theta})e^{-\frac{(\theta-\hat{\theta})^2}{2\sigma^2}}\\ \Rightarrow p(\theta)\propto e^{-\frac{(\theta-\hat{\theta})^2}{2\sigma^2}} \end{gather*} \] Suppose \(f(\theta)=e^{-\frac{(\theta-\hat{\theta})^2}{2\sigma^2}}\), then we can approximate \(p(\theta)\) as \[ \begin{gather*} p(\theta)\approx \frac{1}{\int f(\theta)d\theta}f(\theta)\\ =\frac{1}{\sqrt{2\pi}\sigma\int \frac{1}{\sqrt{2\pi}\sigma}e^{-\frac{(\theta-\hat{\theta})^2}{2\sigma^2}}d\theta}e^{-\frac{(\theta-\hat{\theta})^2}{2\sigma^2}}\\ =\frac{1}{\sqrt{2\pi}\sigma}e^{-\frac{(\theta-\hat{\theta})^2}{2\sigma^2}}\\ \text{where }\int f(\theta)d\theta\text{ is the normalizing term} \end{gather*} \] As a result, pdf of \(\theta\) is approximated by a normal distribution using Laplace method, which can be shown as below \[ \begin{gather*} \theta\sim N(\hat{\theta},\sigma^2)\\ \sigma^2=(\frac{-d^2lnp(\theta)}{d\theta^2}|_{\hat{\theta}})^{-1}>0 \end{gather*} \]